VIDEO: Robotska hvataljka inspirirana vinovom lozom
- Objavljeno u Znanost
U hortikulturnom svijetu, neke vinove loze mogu se omotati oko prepreka s dovoljnom silom da sruše cijele ograde i drveće.Inspirirani vijugavom žilavošću vinove loze, inženjeri s američkog tehnološkog instituta MIT i Sveučilišta Stanford, razvili su robotsku hvataljku koja se može kretati okolo i podizati razne predmete, uključujući staklenu vazu i lubenicu, nudeći nježniji pristup u usporedbi s konvencionalnim dizajnom hvataljki. Veća verzija robotskih hvataljki također može sigurno podići čovjeka iz kreveta.
Novi bot sastoji se od tlačne kutije, postavljene blizu ciljanog objekta, iz koje se napuhuju i rastu duge cijevi nalik vinovoj lozi, poput čarapa okrenutih naopačke. Kako se izdužuju, loze se uvijaju i omotavaju oko objekta prije nego što se nastave natrag prema kutiji, gdje se automatski stežu na mjesto i mehanički namotavaju natrag kako bi nježno podigle objekt mekim, poput remena hvatanjem.
Istraživači su pokazali da robot-loza može sigurno i stabilno podizati razne teške i lomljive predmete. Robot se također može provlačiti kroz uske prostore i gurati kroz nered kako bi dosegao i uhvatio željeni predmet, kao što možete vidjeti u ovom videu.Tim predviđa da bi se ova vrsta robotske hvataljke mogla koristiti u širokom rasponu scenarija, od poljoprivredne žetve do utovara i istovara teškog tereta. U bliskoj budućnosti, grupa istražuje primjenu u ustanovama za njegu starijih osoba, gdje bi mekane napuhane robotske lijane mogle pomoći u nježnom podizanju osobe iz kreveta.
„Premještanje osobe iz kreveta jedan je od fizički najnapornijih zadataka koje njegovatelj obavlja“, kaže Kentaro Barhydt, doktorand na Odjelu za strojarstvo MIT-a. „Ova vrsta robota može pomoći u rasterećenju njegovatelja, a može biti i nježnija i ugodnija za pacijenta.“
Tim s MIT-a i Stanforda zamislio je da bi se kao alternativa robot nalik vinovoj lozi mogao nježno provlačiti ispod i oko pacijenta kako bi stvorio vlastitu vrstu povoja, bez potrebe da njegovatelj fizički manevrira pacijentom. No, kako bi podigli povoj, istraživači su shvatili da će morati dodati element koji je nedostajao u postojećim dizajnima robota nalik vinovoj lozi: u biti, morali bi zatvoriti petlju.
U konfiguraciji otvorene petlje, robotska loza može rasti i okretati se oko objekta kako bi stvorila čvrst hvat. Može se čak i ukopati ispod čovjeka koji leži na krevetu. Nakon što se hvat uspostavi, loza može nastaviti rasti prema svom izvoru i pričvrstiti se za njega, stvarajući zatvorenu petlju koja se zatim može uvući kako bi se objekt dohvatio.
Kao demonstraciju svog novog koncepta otvorene i zatvorene petlje, tim je izgradio veliki robotski sustav dizajniran za sigurno podizanje osobe iz kreveta. Sustav se sastoji od skupa kutija pod tlakom pričvršćenih na oba kraja nadzemne šipke. Zračna pumpa unutar kutija polako napuhuje i odmotava tanke cijevi nalik vinovoj lozi koje se protežu prema uzglavlju i podnožju kreveta.
Tlak zraka može se kontrolirati kako bi se cijevi nježno pomicale ispod i oko osobe, prije nego što se istegnu natrag do njihovih odgovarajućih kutija. Loze se zatim provlače kroz stezni mehanizam koji ih pričvršćuje za svaku kutiju. Vitlo namotava loze natrag prema kutijama, pritom nježno podižući osobu.
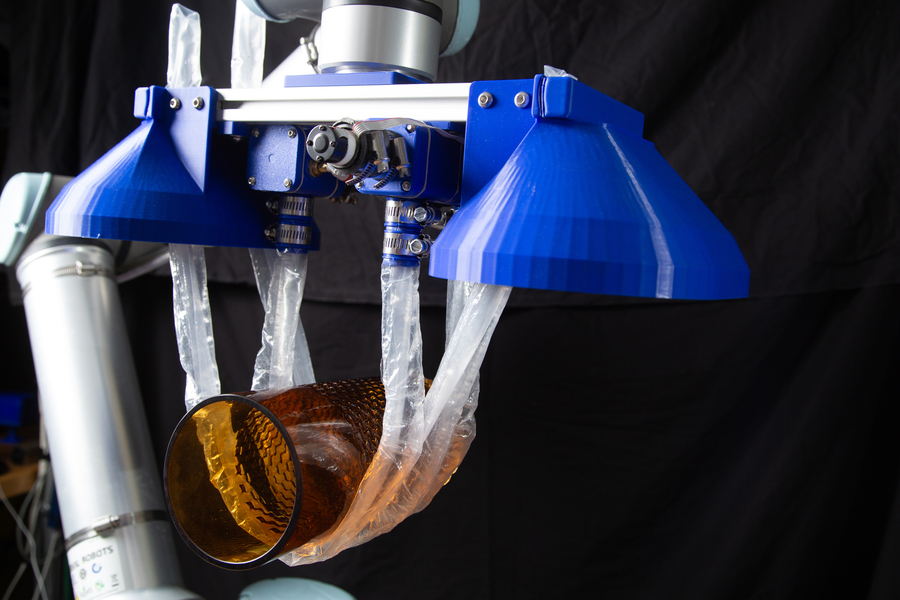
Iako je dizajn tima bio motiviran izazovima u skrbi za starije osobe, istraživači su shvatili da se novi dizajn može prilagoditi i za obavljanje drugih zadataka hvatanja. Uz svoj veliki sustav, izgradili su i manju verziju koja se može pričvrstiti na komercijalnu robotsku ruku.
S ovom verzijom, tim je pokazao da robot može hvatati i podizati razne teške i krhke predmete, uključujući lubenicu, staklenu vazu, hrpu metalnih šipki i loptu. Loze se također mogu provlačiti kroz pretrpanu kantu za smeće kako bi izvukle željeni predmet.
Barhydt, zajedno sa svojim koautorom sa Stanforda, O. Godsonom Oseleom, i njihovim kolegama, predstavljaju novi robotski dizajn u časopisu Science Advances.