VIDEO: Dron maše krilima učinkovitije od insekata
- Objavljeno u Znanost
Koliko god su se znanost i inženjerstvo unaprijedili, priroda je ispred ljudi imala prednost od 4 milijarde godina, tako da se i dan danas često poslužujemo primjerima iz prirode koje kopiramo i usavršujemo za svoje potrebe.
Inženjeri na Sveučilištu u Bristolu razvili su sićušnog letećeg robota po uzoru na vretence ili vilinog konjica koji maše krilima učinkovitije od kukca, koristeći jedinstveni elektrostatički mehanizam.
Novi dron tima iz Bristola koristi sustav umjetnih mišića koji nazivaju LAZA (liquid-amplified zipping actuator), koji ne zahtijeva mehanički prijenos ili transmisiju.
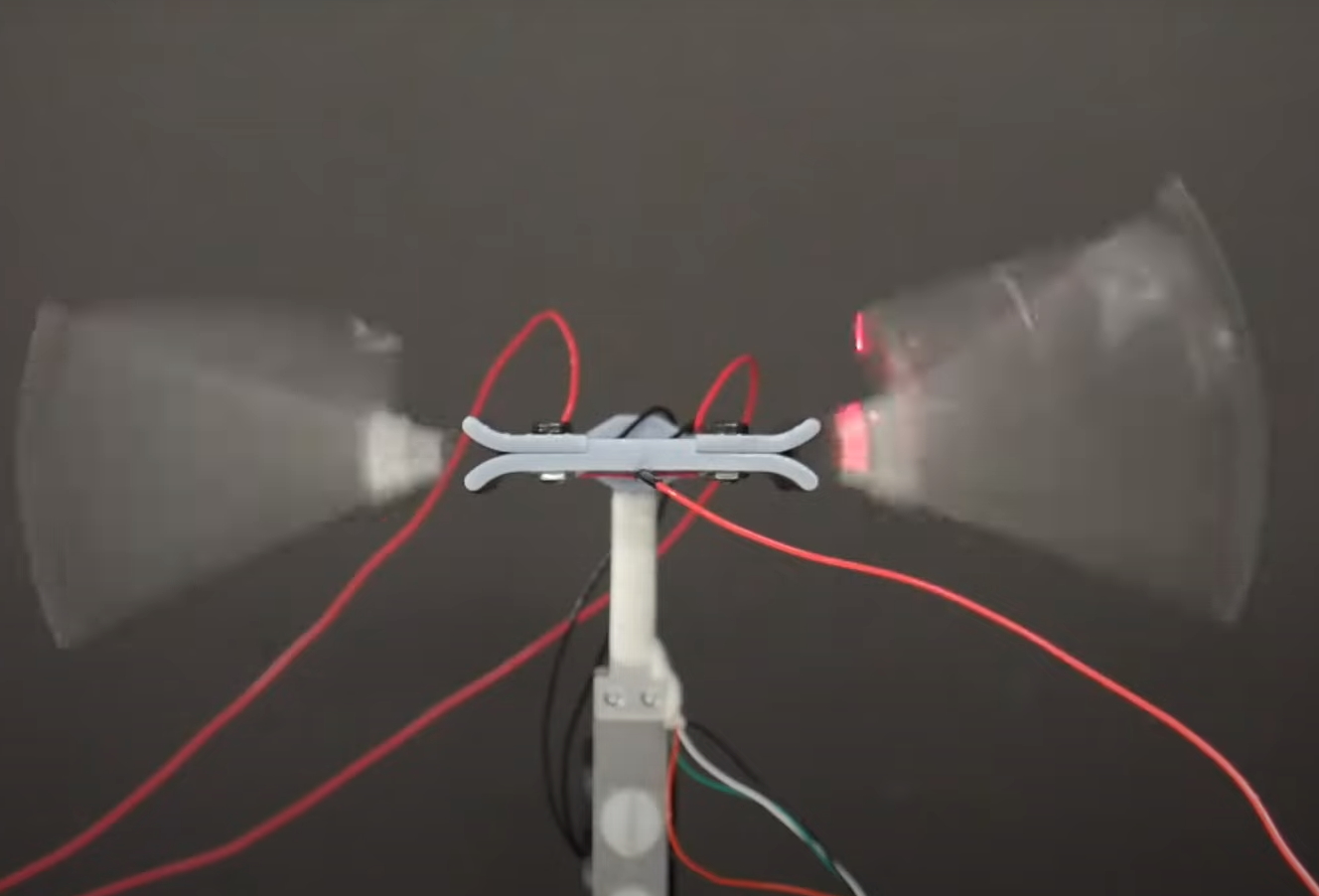
Svako krilo drona sastoji se od elektrode koja strši između dvije druge manje elektrode u podnožju. Visoki napon se šalje kroz svaku od osnovnih elektroda naizmjeničnim uzorkom, privlačeći krilnu elektrodu na svaku od njih. Učinite to dovoljno brzo i to će proizvesti trepereće kretnje (mahanje), koje je pojačano tekućim dielektrikom između elektroda, kao što možete vidjeti u ovom videu.
"S LAZA-om primjenjujemo elektrostatičke sile izravno na krilo, a ne kroz složeni, neučinkoviti sustav prijenosa", rekao je Tim Helps, glavni autor studije. "To dovodi do boljih performansi, jednostavnijeg dizajna i stvorit će novu klasu jeftinih, laganih mikro zračnih vozila s krilima koja mašu a mogla bi se primjenjivati za razne zadaće poput autonomnih inspekcija vjetroturbina na moru."
Tim kaže da sustav LAZA omogućuje finu kontrolu frekvencije i amplitude lepeta krila, te može pružiti više snage od mišića sisavaca ili kukaca iste veličine. U testovima je mogao letjeti preko sobe brzinom od oko 2,5 km/h, ili 18 duljina svojeg tijela u sekundi. Njegovo mahanje krilima trajalo je više od milijun ciklusa bez pada performansi, što pokazuje da bi trebao biti sposoban letjeti na velike udaljenosti.
Tim kaže da bi sustav LAZA u konačnici mogao dovesti do manjih i okretnijih dronova koji bi se mogli koristiti u praćenju okoliša, istraživanju, potrazi i spašavanju, ili čak oprašivanju biljaka.
Istraživanje je objavljeno u časopisu Science Robotics i možete ga pronaći na ovoj poveznici.