VIDEO: SimPLE robotima donosi svestranost manipulacije
- Objavljeno u Znanost
Roboti koji danas rade u industrijskom okruženju obično su programirani za izvođenje pojedinačnih zadaća, a ako se uvjeti, okoliš i objekti kojima manipuliraju samo malo promijene, ne mogu se prilagoditi, što ih čini neučinkovitim i preskupim.
Znanstvenici Odjela za strojarstvo na američkom institutu tehnologije MIT, razvili su model pod nazivom SimPLE koji se može sam prilagođavati i učiti o objektima iz CAD datoteka.
U preciznom odabiru i postavljanju objekata, poznatom kao "kitting", robot pretvara nestrukturirani raspored objekata u organizirani raspored. Pristup, nazvan SimPLE (Simulation to Pick Localize and placE), uči birati i postavljati objekte pomoću modela računalno potpomognutog dizajna, a sve to bez ikakvog prethodnog iskustva ili susreta s određenim objektima.
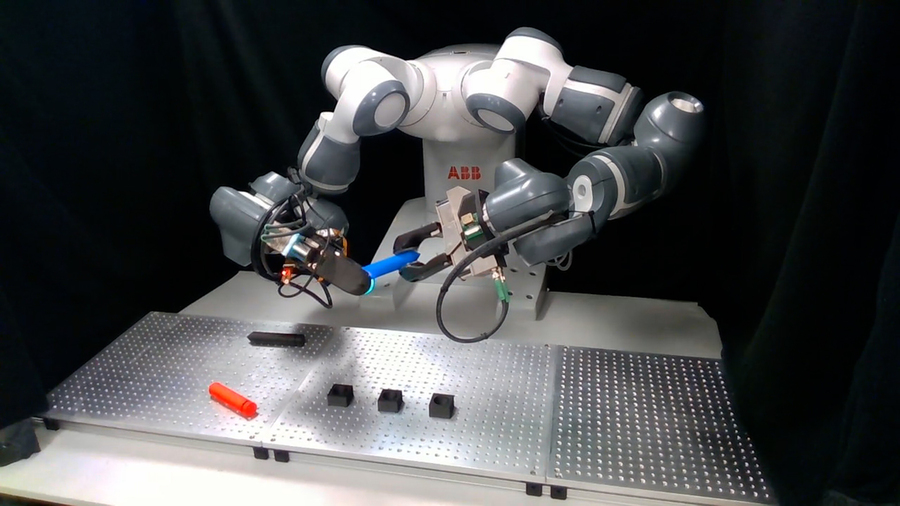
Koristeći robota s dvije ruke opremljenog vizualno-taktilnim senzorom, rješenje SimPLE koristi tri glavne komponente: hvatanje temeljeno na svjesnosti zadatka, percepciju vidom i dodirom (vizuotaktilna percepcija) i planiranje ponovnog hvatanja. Stvarna zapažanja uspoređuju se sa skupom simuliranih zapažanja kroz nadzirano učenje tako da se može procijeniti distribucija vjerojatnih poza objekata i izvršiti njihovo postavljanje.
U eksperimentima, SimPLE je uspješno demonstrirao sposobnost odabira i postavljanja različitih objekata koji obuhvaćaju širok raspon oblika, postižući uspješna postavljanja u više od 90 posto slučajeva za 6 objekata i više od 80 posto vremena za 11 objekata, kao što možete vidjeti u ovom videu.
Autori kombiniraju dobro utemeljene geometrijske algoritme koji mogu pouzdano postići visoku preciznost za određeni skup oblika objekata i pokazuju da ta kombinacija može značajno poboljšati performanse u odnosu na metode umjetne inteligencije.
Istraživački rad objavljen u časopisu Science Robotics možete pronaći na ovoj poveznici.