Nova metoda za upravljanje umjetnim mišićima
- Objavljeno u Znanost
Takozvani mekani roboti, koji su građeni od laganih fleksibilnih materijala i pokretani pneumatskim mišićima koji imitiraju ljudske, postat će vrlo važni u brojnim primjenama, od sigurne suradnje na raznim poslovima s ljudima, do rada za potrebe traganja i spašavanja u prirodnim katastrofama.
Međutim, upravljanje mekom dinamikom za praktične primjene ostaje i dalje značajan izazov, jer su upravljački sustavi najčešće teški i nedovoljno učinkoviti.
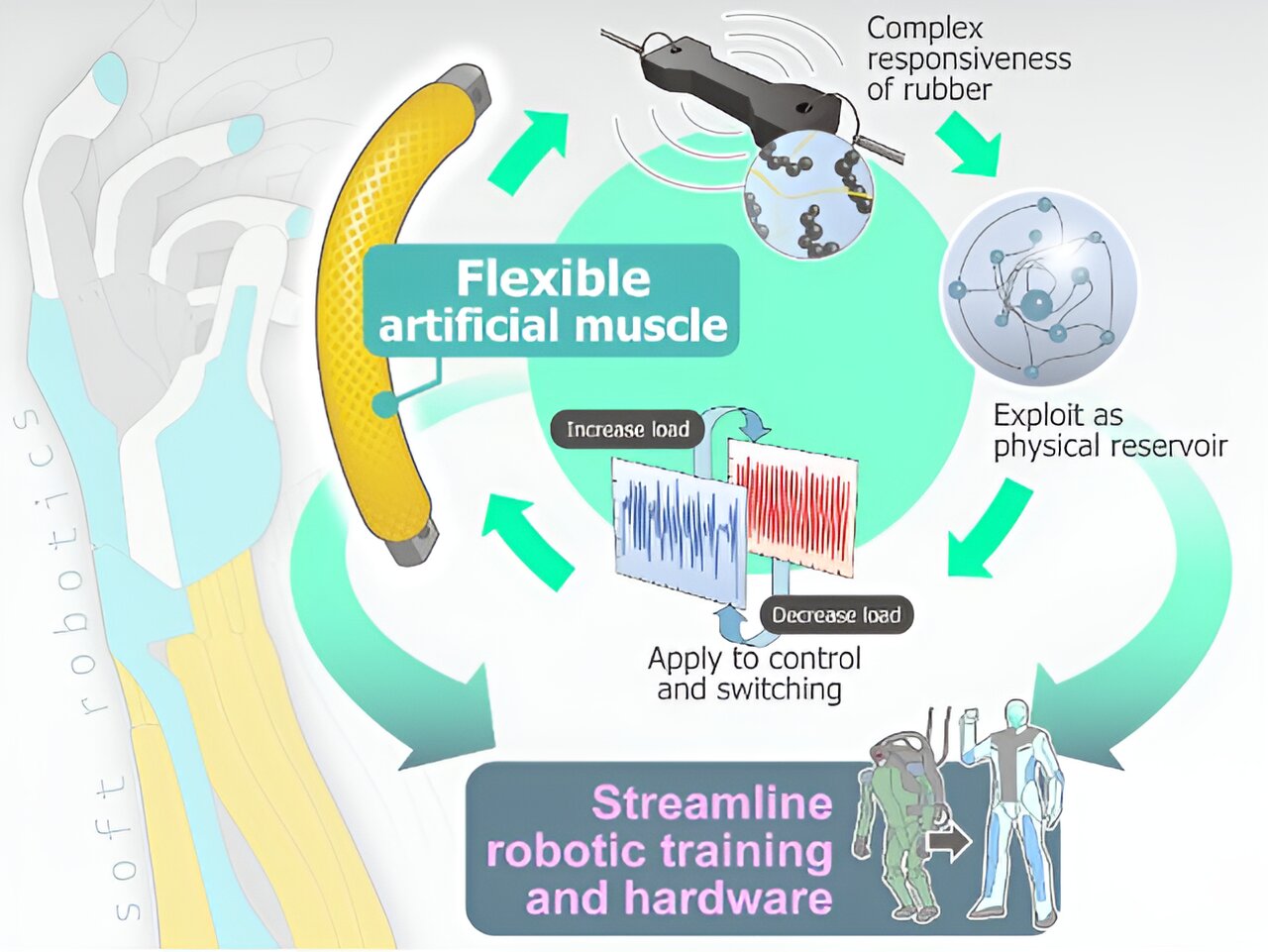
Istraživači na japanskom Sveučilištu u Kyotu, u suradnji sa Sveučilištem u Tokiju i tvrtkom Bridgestone Corporation, sada su razvili metodu za kontrolu pneumatskih umjetnih mišića, koji su u osnovi mekani robotski aktuatori.
"Pokazali smo sposobnost aktuatora da autonomno generiraju raznoliku dinamiku, uključujući ritmičke uzorke", objašnjava znanstvenik Nozomi Akashi s Fakulteta informatike u Kyotu.
Tradicionalno, uzorci su generirani vanjskim pričvršćivanjem oscilatora na robote, omogućavajući kretanje i ponavljajuće pokrete. Međutim, ove oscilatore treba ukloniti s robota kako bi zadržali svoju mekoću. Akashijev tim se bavi ovim problemom kako bi povećao potencijal mekih robota.
"Osim toga, bifurkacijske strukture koje mijenjaju obrazac mogu se ugraditi u sam robotski aktuator", kaže Kohei Nakajima sa Fakulteta informacijskih znanosti i tehnologije Sveučilišta u Tokiju.
Nalazi sugeriraju da roboti mogu generirati kvalitativno različite obrasce izvan podataka o učenju, utirući put razvoju robota sposobnijih za prilagodljivije i fleksibilnije pokrete.
"Ovo bi moglo pojednostaviti proces razvoja hardvera i softvera, čineći ga učinkovitijim i učinkovitijim", zaključuje Akashi.
Znanstveni rad objavljen u časopisu Advanced Science možete pronaći na ovoj poveznici.