VIDEO: Robot za krpanje plinovoda iznutra
- Objavljeno u POP TECH
Istraživači s američkog Instituta za robotiku Sveučilišta Carnegie Mellon u Pittsburghu, razvijaju modularnog robota koji se može uvući u cjevovode prirodnog plina kako bi mapirao cijevi, otkrio dotrajale cijevi ili cijevi koje cure i, kada je potrebno, popravio cijev nanošenjem smole na njezinu unutarnju stijenku.
Ograničeni prostori cijevi, uglavnom nedostupni ljudima, prirodno su mjesto za postavljanje robota. Tijekom godina CMU istraživači i spinout tvrtke razvili su niz shema i robota za inspekciju kanalizacije, distribucije plina i cijevi nuklearnih elektrana.
Najnoviji projekt REPAIR, koji se sada bliži završetku nakon tri godine razvoja, uključuje ne samo robotski pregled cijevi za prirodni plin, već i popravak putem robota. Sponzorira ga Ministarstvo energetike SAD-a (DOE) kroz Agenciju za napredna istraživanja za energiju (ARPA-E) i njen program brze inkapsulacije cjevovoda.
Program REPAIR ima za cilj korištenje robota i pametnih premaza za izgradnju novih cijevi unutar onih koje cure. Ovaj proces koji uključuje ostavljanje cijevi na mjestu i njihovo popravljanje iznutra prema van, mogao bi drastično smanjiti troškove prema procjenama DOE-a.
DOE želi popravke koji će trajati najmanje 50 godina, a posebno je zainteresiran za pregled i popravak cijevi od lijevanog željeza i golog čelika. Iako su ove cijevi u velikoj mjeri potisnute cijevima od crnog čelika i drugih materijala, one još uvijek čine oko 3% mreže u SAD-u i odgovorne su za nerazmjeran broj curenja i kvarova.
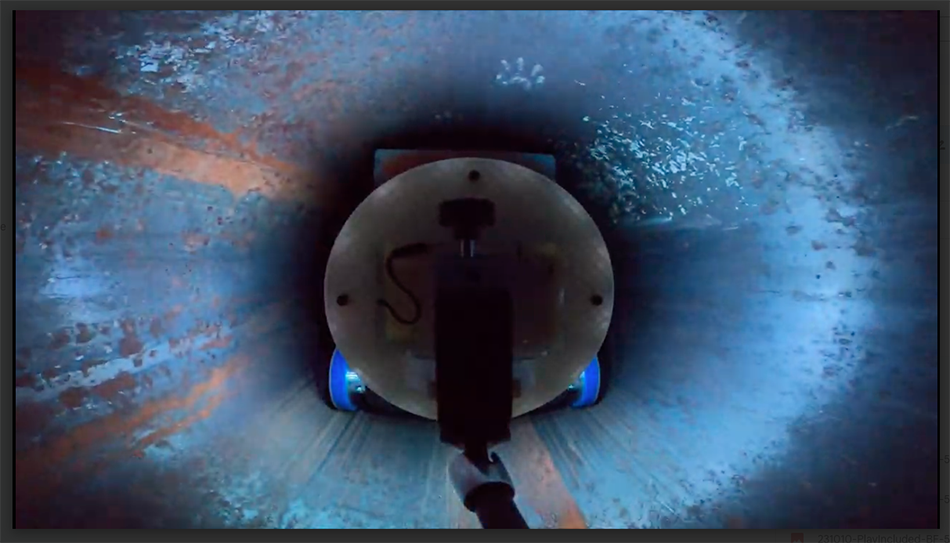
Robotski sustav koji razvija CMU mogao bi se postaviti u cijevi od bilo kojeg materijala. Također je modularan, tako da se može konfigurirati za svaki posao. Uključuje modul mobilnosti koji se nalazi na paru kotača od dva inča, s trećim kotačem na vrhu modula. I smola za popravak cijevi i baterije koje napajaju robota mogu biti prilično teške, a tri kotača daju vuču potrebnu da modul povuče do 30 kg korisnog tereta, kao što možete vidjeti u ovom videu.
Robotski sustav nije posebno brz, ali može pregledati oko 14 km cijevi u 8 sati. Operacije popravka su malo sporije, ali mogu obnoviti oko 4,5 km cijevi u osam sati.
Razvijena na Sveučilištu Illinois, smola u početku ima konzistenciju mekog sladoleda, ali se stvrdne unutar nekoliko sekundi nakon što se nanese na stijenku cijevi. Istraživači CMU-a razvili su robotski modul s rotirajućom mlaznicom koja nanosi smolu kao kontinuiranu kuglicu koja se spiralno okreće uzduž stijenke cijevi dok se robot približava.
Uz modul za nanošenje smole, sustav uključuje modul za mapiranje koji ima optički senzor visoke rezolucije. Senzor ispituje boju cijevi i koristi laserski sustav za precizna mjerenja nedostataka cijevi za izradu trodimenzionalnih rekonstrukcija. Inženjeri na mjestu inspekcije mogu koristiti proširenu stvarnost za pronalaženje i mapiranje površinskih spojeva, zavarenih šavova i identificiranje strukturnih nedostataka.
Umjetna inteligencija pomaže u procjeni podataka koje je prikupio robot. Roboti koriste tehniku koja se naziva simultana lokalizacija i mapiranje (SLAM) za izradu vrlo detaljnih mapa cijevi.
Robotski sustav sada ima domet od 60 metara, ali konačni cilj je dva kilometra. Trenutna verzija robota dizajnirana za cijevi promjera 12 inča, a verzija za cijevi od 6 inča je u razvoju.